SP-OPS Outdoor Parking System ™
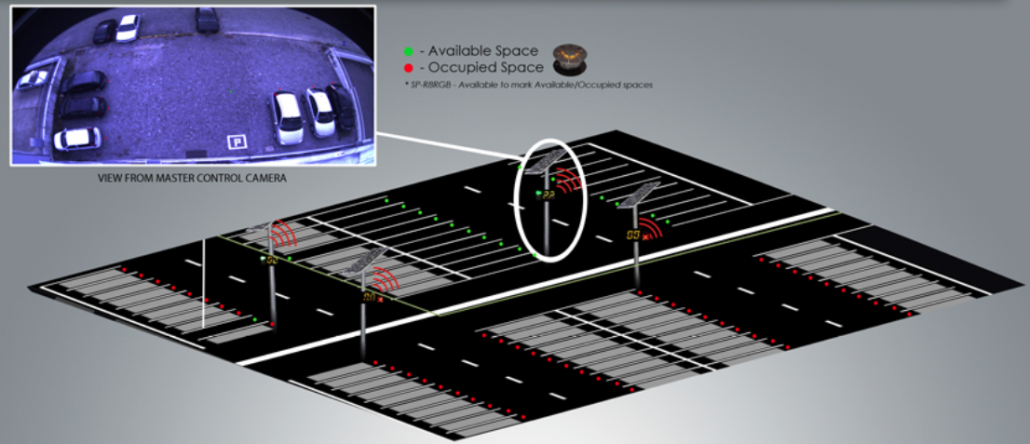
Our Outdoor Parking System (SP-OPS)™ is based in real image processing. Each camera can detect up to 50 places at 13 meters tall. The reliability of the system is based on a mark detection painted on the floor. With mark detection by image processing there is no problems related with light variations caused by the clouds, for example.
Each camera is an embedded system that processes and analyses the image in real time (locally) providing data output wirelessly through ZigBee protocol. Each camera can be seen as a set of virtual sensors (one for each place). A personal computer (central computer) with a ZigBee USB dongle (ZigBee gateway) receives the state of places monitored by each camera.
The places configuration is done separately for each camera. To configure the places, the user the connects a PC / laptop to the camera (via Ethernet port). The PC / laptop is running a client application (windows platform) that handle the drawing of the area corresponding to each place. The system gives automatically a name to each place drawn and saves that information locally on the camera. After that the user disconnects the PC/ laptop and the system is ready to analyze each place and sends its state (free or occupied) to a central computer through ZigBee.
The output data format may be what you want. Another words, its a matter of make an agreement with you to provide what filled better your requirements. However, the best choice to get the output data is through a TCP/IP connection (via localist on the central PC). We can use a private protocol defined by us or by Web services, for example, I think that Web Services will be a good choice due to standardization.
It is also possible to send output data via Ethernet port of the camera. We provide a TCP/IP server on the camera. In that case you need an Ethernet cable permanently connected between the camera and the central PC. However , this arrangement implies only one camera connected to the central PC.